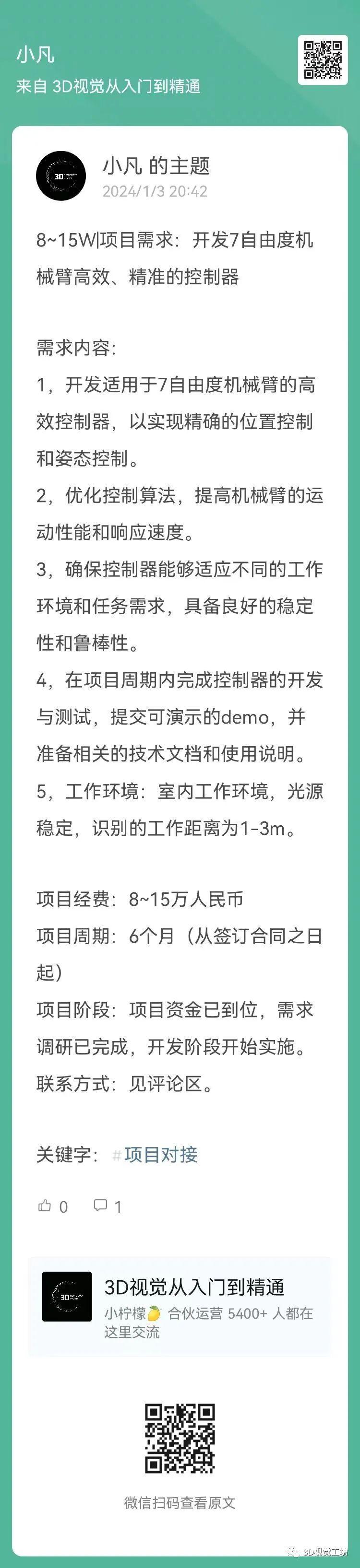
8~15W | 项目需求:开发7自由度机械臂高效、精准的控制器
项目来源:3D视觉从入门到精通知识星球
需求内容:
开发适用于7自由度机械臂的高效控制器,以实现精确的位置控制和姿态控制。
优化控制算法,提高机械臂的运动性能和响应速度。
确保控制器能够适应不同的工作环境和任务需求,具备良好的稳定性和鲁棒性。
在项目周期内完成控制器的开发与测试,提交可演示的demo,并准备相关的技术文档和使用说明。
工作环境:室内工作环境,光源稳定,识别的工作距离为1-3m。
项目经费:8~15万人民币
项目周期:6个月(从签订合同之日起)
项目阶段:项目资金已到位,需求调研已完成,开发阶段开始实施。
联系方式:公众号「3DCV」后台回复「机械臂」,获取项目方联系方式,星球成员可直接在星球内获取。
下载
在公众号「3D视觉工坊」后台,回复「3dcv」,即可获取工业3D视觉、SLAM、自动驾驶、三维重建、事件相机、无人机等近千余篇最新顶会论文;巴塞罗那自治大学和慕尼黑工业大学3D视觉和视觉导航精品课件;相机标定、结构光、三维重建、SLAM,深度估计、模型部署、3D目标检测等学习资料。
3D视觉方向交流群成立啦
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶、三维重建、无人机方向,细分群包括:
[工业3D视觉]相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
[SLAM]视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
[自动驾驶]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
[三维重建]NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
[无人机]四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。