STM32 IIC开发学习
1IIC总线时序图
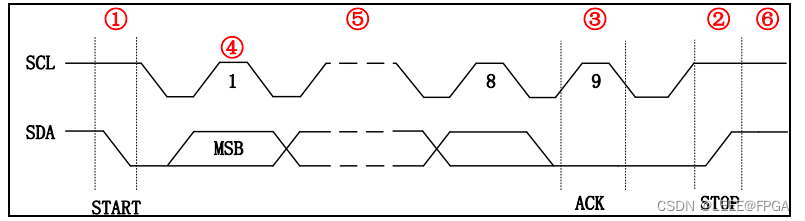
① 起始信号
当 SCL 为高电平期间,SDA 由高到低的跳变。起始信号是一种电平跳变时序信号,而不是
一个电平信号。该信号由主机发出,在起始信号产生后,总线就会处于被占用状态,准备数据
传输。
② 停止信号
当 SCL 为高电平期间,SDA 由低到高的跳变。停止信号也是一种电平跳变时序信号,而不
是一个电平信号。该信号由主机发出,在停止信号发出后,总线就会处于空闲状态。
③ 应答信号
发送器每发送一个字节,就在时钟脉冲 9 期间释放数据线,由接收器反馈一个应答信号。
应答信号为低电平时,规定为有效应答位(ACK 简称应答位),表示接收器已经成功地接收了
该字节。应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成
功。
观察上图标号③就可以发现,有效应答的要求是从机在第 9 个时钟脉冲之前的低电平期间
将 SDA 线拉低,并且确保在该时钟的高电平期间为稳定的低电平。如果接收器是主机,则在它
收到最后一个字节后,发送一个 NACK 信号,以通知被控发送器结束数据发送,并释放 SDA
线,以便主机接收器发送一个停止信号。
④ 数据有效性
IIC 总线进行数据传送时,时钟信号为高电平期间,数据线上的数据必须保持稳定,只有在
时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。数据在 SCL 的上
升沿到来之前就需准备好。并在下降沿到来之前必须稳定。
⑤ 数据传输
在 IIC 总线上传送的每一位数据都有一个时钟脉冲相对应(或同步控制),即在 SCL 串行
时钟的配合下,在 SDA 上逐位地串行传送每一位数据。数据位的传输是边沿触发。
⑥ 空闲状态
IIC 总线的 SDA 和 SCL 两条信号线同时处于高电平时,规定为总线的空闲状态。此时各个
器件的输出级场效应管均处在截止状态,即释放总线,由两条信号线各自的上拉电阻把电平拉
高。
IIC写操作
下面介绍一下 IIC 的基本的读写通讯过程,包括主机写数据到从机即写
操作,主机到从机读取数据即读操作。
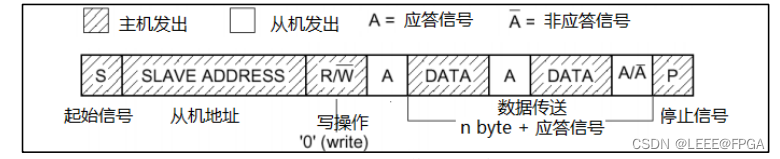
主机首先在 IIC 总线上发送起始信号,那么这时总线上的从机都会等待接收由主机发出的
数据。主机接着发送从机地址+0(写操作)组成的 8bit 数据,所有从机接收到该 8bit 数据后,自
行检验是否是自己的设备的地址,假如是自己的设备地址,那么从机就会发出应答信号。主机
在总线上接收到有应答信号后,才能继续向从机发送数据。注意:IIC 总线上传送的数据信号是广义的,既包括地址信号,又包括真正的数据信号。
IIC读操作
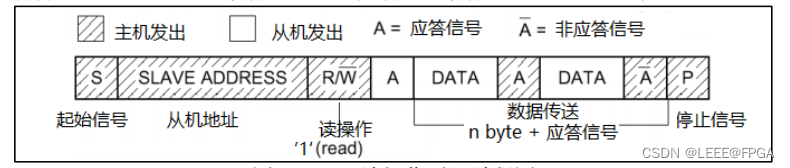
主机向从机读取数据的操作,一开始的操作与写操作有点相似,观察两个图也可以发现,
都是由主机发出起始信号,接着发送从机地址+1(读操作)组成的 8bit 数据,从机接收到数据验
证是否是自身的地址。 那么在验证是自己的设备地址后,从机就会发出应答信号,并向主机返
回 8bit 数据,发送完之后从机就会等待主机的应答信号。假如主机一直返回应答信号,那么从
机可以一直发送数据,也就是图中的(n byte + 应答信号)情况,直到主机发出非应答信号,从
机才会停止发送数据。
STM32 完成IIC的各个阶段的c代码
myiic.h
#ifndef _MYIIC_H
#define _MYIIC_H
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/delay/delay.h"
/****************************************************************************************************/
/* 引脚 定义 */
#define IIC_SCL_GPIO_PORT GPIOB
#define IIC_SCL_GPIO_PIN GPIO_PIN_10
#define IIC_SCL_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
#define IIC_SDA_GPIO_PORT GPIOB
#define IIC_SDA_GPIO_PIN GPIO_PIN_3
#define IIC_SDA_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
/****************************************************************************************************/
/*IO 高低电平*/
#define IIC_SCL(x) do{x ? \
HAL_GPIO_WritePin(IIC_SCL_GPIO_PORT, IIC_SCL_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(IIC_SCL_GPIO_PORT, IIC_SCL_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* SCL */
#define IIC_SDA(x) do{x ? \
HAL_GPIO_WritePin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* SDA */
#define IIC_READ_SDA HAL_GPIO_ReadPin(IIC_SDA_GPIO_PORT,IIC_SDA_GPIO_PIN) /* 读取SDA */
void iic_start(void);
void iic_stop(void);
static void iic_delay(void);
uint8_t iic_wait_ack(void);
void iic_ack(void);
void iic_nack(void);
void iic_send_byte(uint8_t data);
uint8_t iic_read_byte(uint8_t ack);
#endif
myiic.c
#include "myiic.h"
/**
* @brief 初始化IIC 初始化GPIO
* @param 无
* @retval 无
*/
void iic_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
IIC_SCL_GPIO_CLK_ENABLE(); /* SCL引脚时钟使能 */
IIC_SDA_GPIO_CLK_ENABLE(); /* SDA引脚时钟使能 */
gpio_init_struct.Pin = IIC_SCL_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 快速 */
HAL_GPIO_Init(IIC_SCL_GPIO_PORT, &gpio_init_struct);/* SCL */
gpio_init_struct.Pin = IIC_SDA_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_OD; /* 推挽输出 */
HAL_GPIO_Init(IIC_SDA_GPIO_PORT, &gpio_init_struct);/* SDA */
/* SDA引脚模式设置,开漏输出,上拉, 这样就不用再设置IO方向了, 开漏输出的时候(=1), 也可以读取外部信号的高低电平 */
iic_stop();
}
/**
* @brief IIC延时函数,用于控制IIC读写速度
* @param 无
* @retval 无
*/
static void iic_delay(void)
{
delay_us(2);
}
/**
* @brief 产生IIC起始信号
* @param 无
* @retval 无
*/
void iic_start(void)
{
IIC_SCL(1);
IIC_SDA(1);
iic_delay();
IIC_SDA(0); /* START信号: 当SCL为高时, SDA从高变成低, 表示起始信号 */
iic_delay();
IIC_SCL(0); /* 钳住I2C总线,准备发送或接收数据 */
iic_delay();
}
/**
* @brief 产生IIC停止信号
* @param 无
* @retval 无
*/
void iic_stop(void)
{
IIC_SDA(0);
iic_delay();
IIC_SCL(1); /* STOP信号: 当SCL为高时, SDA从低变成高, 表示停止信号 */
iic_delay();
IIC_SDA(1);
iic_delay();
}
/**
* @brief 等待应答信号到来
* @param 无
* @retval 1,接收应答失败
* 0,接收应答成功
*/
uint8_t iic_wait_ack(void)
{
uint8_t waittime =0;
uint8_t rack =0;
IIC_SDA(1); /* 主机释放SDA线(此时外部器件可以拉低SDA线) */
iic_delay();
IIC_SCL(1); /* SCL=1, 此时从机可以返回ACK */
iic_delay();
while(IIC_READ_SDA) /* 等待应答 */
{
waittime++;
if(waittime>250)
{
iic_stop();
rack=1;
break;
}
}
IIC_SCL(0); /* SCL=0, 结束ACK检查 */
iic_delay();
return rack;
}
/**
* @brief 产生ACK应答
* @param 无
* @retval 无
*/
void iic_ack(void)
{
/* SCL 0 -> 1 时 SDA = 0,表示应答 */
IIC_SDA(0);
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SCL(0);
iic_delay();
IIC_SDA(1); /* 主机释放SDA线 */
iic_delay();
}
/**
* @brief 不产生ACK应答
* @param 无
* @retval 无
*/
void iic_nack(void)
{
/* SCL 0 -> 1 时 SDA = 1,表示非应答 */
IIC_SDA(1);
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SCL(0);
iic_delay();
}
/**
* @brief IIC发送一个字节
* @param data: 要发送的数据
* @retval 无
*/
void iic_send_byte(uint8_t data)
{
uint8_t i;
for(i=0;i<8;i++)
{
IIC_SDA((data&0x80)>>7); /* 高位先发送 */
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SCL(0);
data<<=1; /* 左移1位,用于下一次发送 */
}
IIC_SDA(1);/* 发送完成, 主机释放SDA线 */
}
/**
* @brief IIC读取一个字节
* @param ack: ack=1时,发送ack; ack=0时,发送nack
* @retval 接收到的数据
*/
uint8_t iic_read_byte(uint8_t ack)
{
uint8_t i;
uint8_t rec=0;
for(i=0;i<8;i++) /* 接收1个字节数据 */
{
rec<<=1; /* 高位先输出,所以先收到的数据位要左移 */
IIC_SCL(1);
iic_delay();
if(IIC_READ_SDA)
{
rec++;
}
IIC_SCL(0);
iic_delay();
}
if(!ack)
{
iic_nack();
}
else
{
iic_ack();
}
return rec;
}