【algorithm】自动驾驶常见常考的几个模型和推导,顺便总结自己遇到的考题经验不断更新之———控制版
写在前面
本来快达成目标了,没想到公司遭受了问题,公司和同事我感觉还是挺好的,有国企的正规也有小企业的灵活,大家都很有学习欲望。
作为本次再次复习回忆如下:
把之前面试准备的 机器学习(基本搬运到CSDN平台了)、规划(基于之前的公司同事教导和常见算法轨迹 lattice em 路径 diji a star rrt rrt*)、控制(控制器和模型),工具链(matlab ide repo git anaconda ros linux操作)其他(frenet 、大地车辆坐标转换、点到线距离、找投影、插值、离散点求曲率(以及各种几何问题)、卡尔曼 三次道路多项式 地图处理 滤波 轨迹优化)刷题和有cpp相关的作为小白接触到的知识都总结成了word。 本文先总结搬运模型相关,希望大佬们给点方向提建议,渴望进步,其实对于经典现代控制论本身,很多东西都忘记了,只能作为笔记和考试记录存在了,实践中感觉一直用不上或者不需要再推导了。 现在的烦恼是:其中有很多新东西和非规划控制的内容由于工作方向我只能自己demo,最希望讨论和接触的是实践中积累的问题处理办法,还有能实际在工作中部署最新论文的东西,可惜工作就是工作,同时被专业方向卡住,只能积累再积累。
outline
- stanley pp
- 动力学 运动学 简单推导
- mpc
- pid
- acado 和osqp求解 见另外两篇文章
Acado:https://blog.csdn.net/weixin_46479223/article/details/133743263的实例中展示了acado如何求解mpc问题,
另一篇是osqposqp:https://blog.csdn.net/weixin_46479223/article/details/135107257 - 临时简略EM planner 信息
Stanley and pure pursuit

运动学

动力学

并联pid
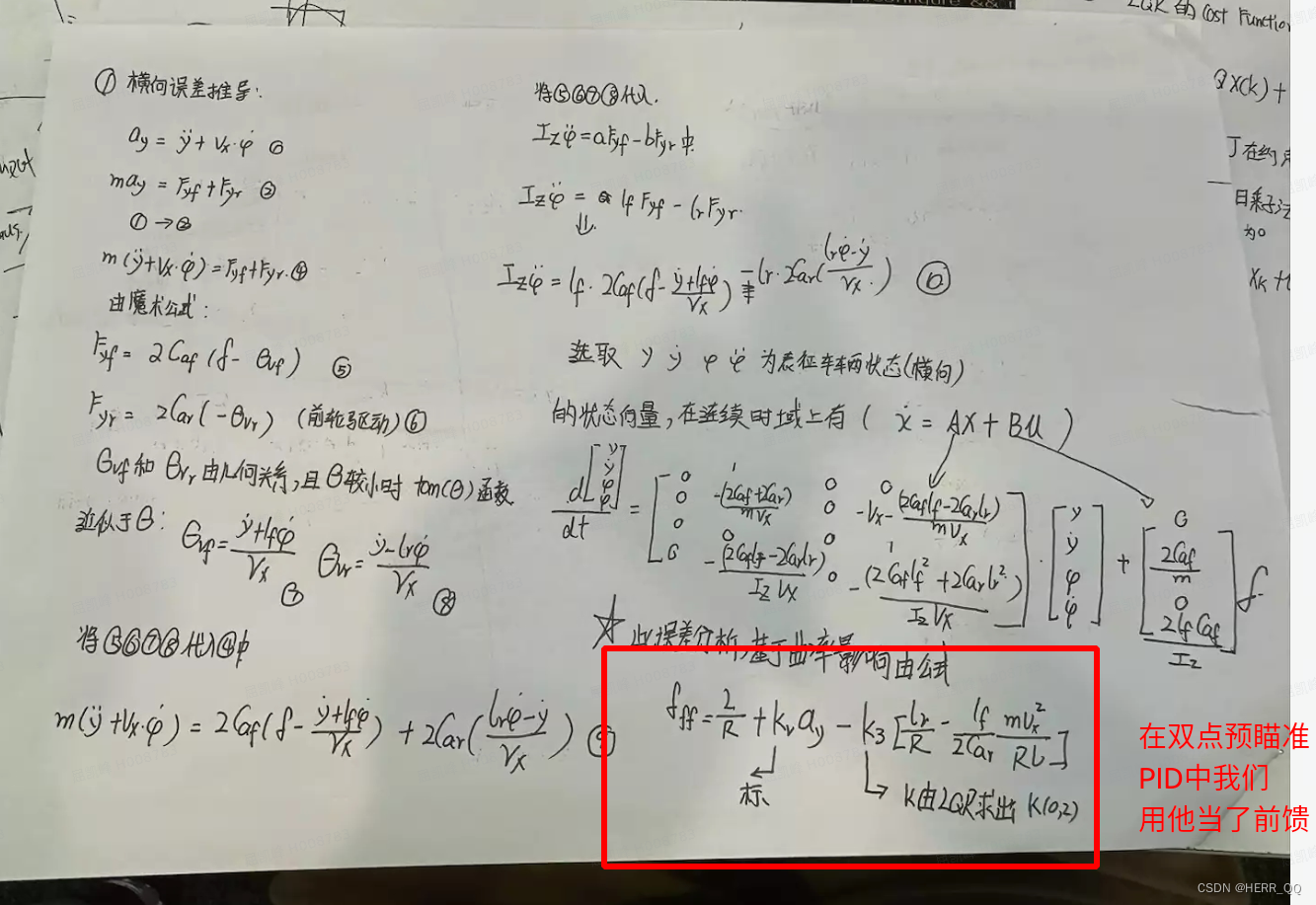
- 预瞄 2个点 近:lateraldisdiff lateraldisdiffrate 远headingdiff headingdiffrate
- yawrate 要稳 pd要控制好
- 找瞄准点用几何法
串联pid

MPC控制横向 pid纵向
(纵向mpc osqp见另一篇文章的demo)https://blog.csdn.net/weixin_46479223/article/details/135107257
会找投影点 预瞄要选好 用acado osqp ,具体模型一会更新
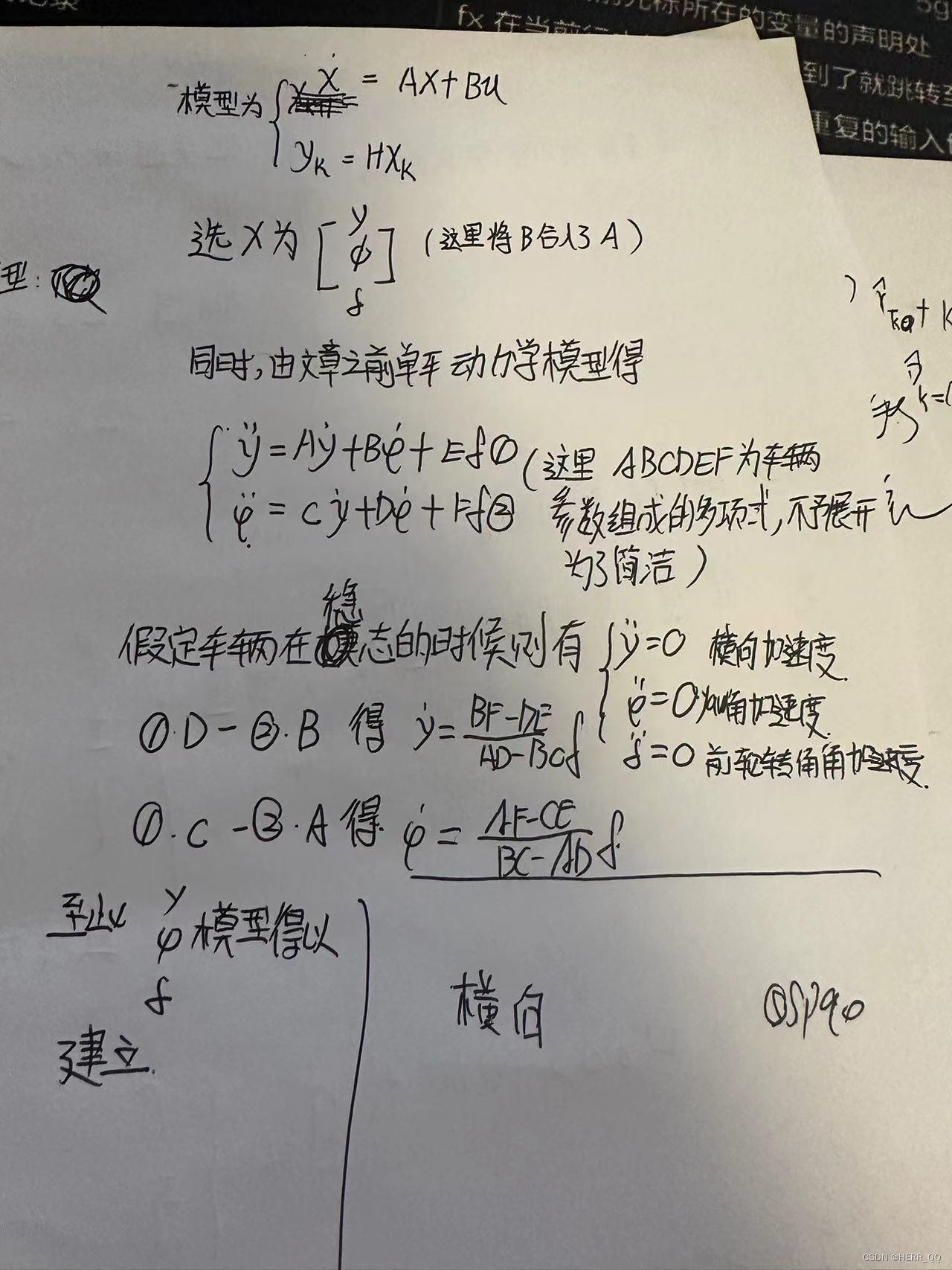
模型推导
在我的文章Acado:https://blog.csdn.net/weixin_46479223/article/details/133743263的实例中展示了acado如何求解mpc问题
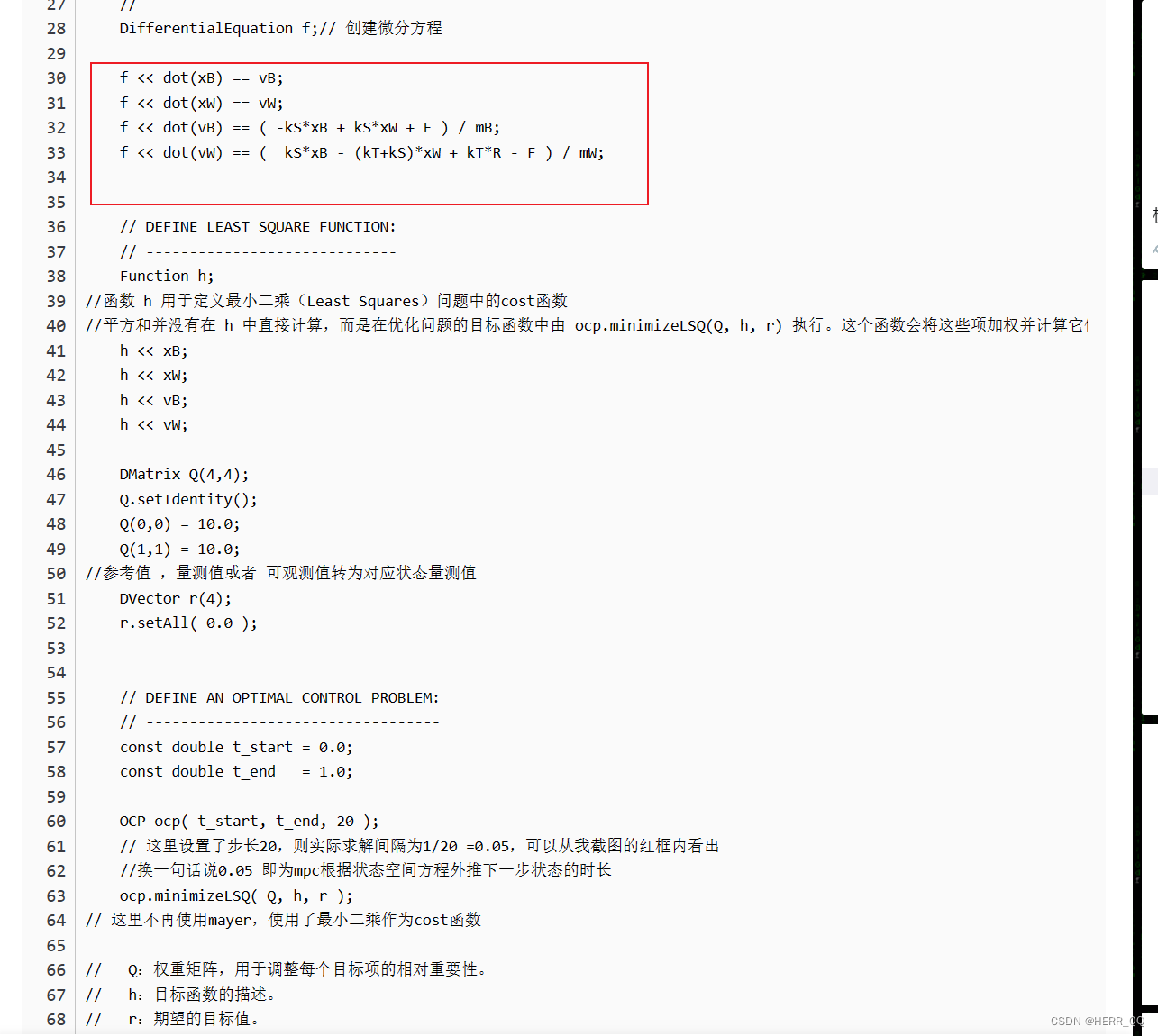
可见acado很方便,直接给出车辆模型的微分方程,以及求解时域(步长)、约束、和目标函数就可以生成相关代码。
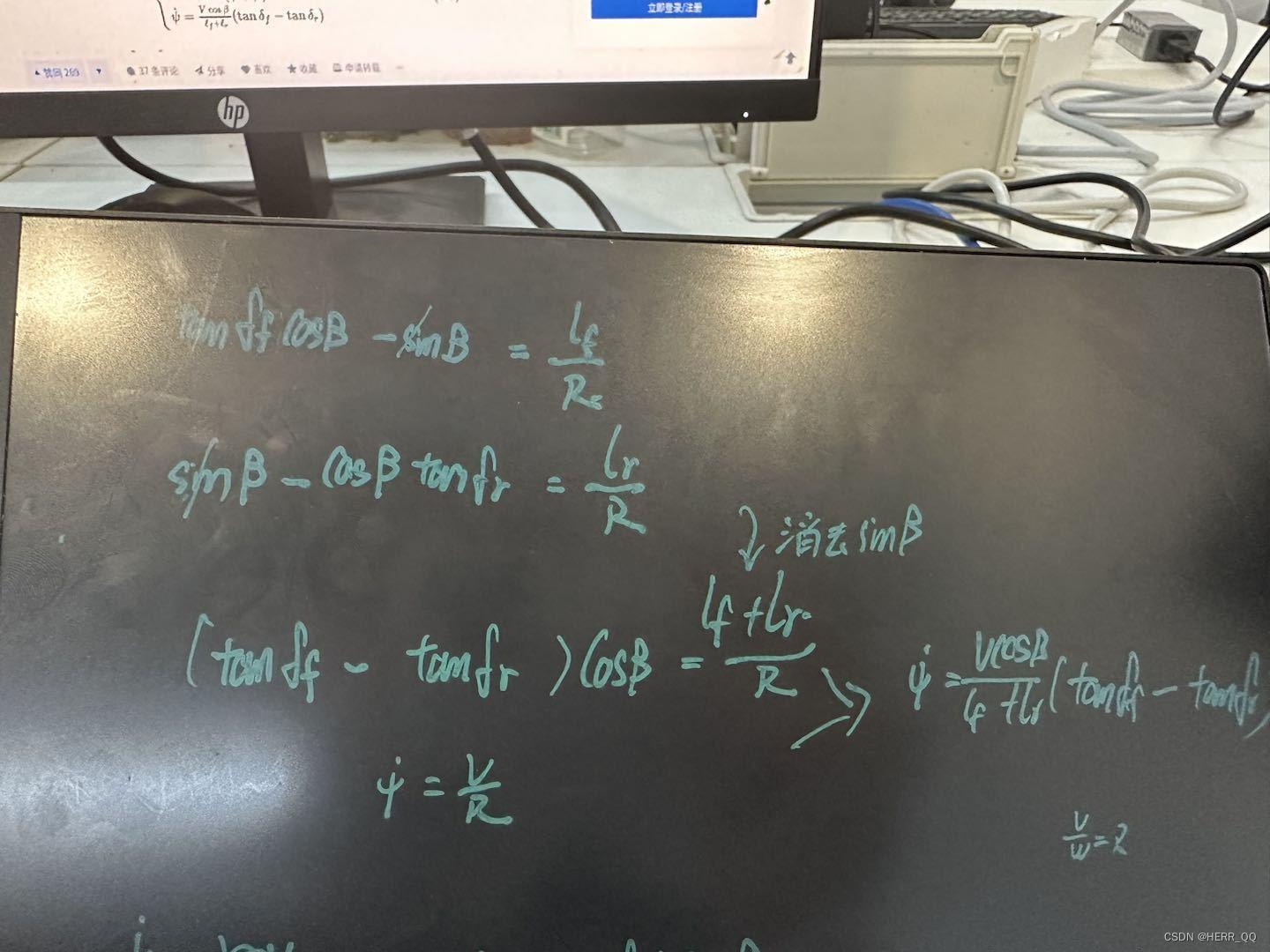
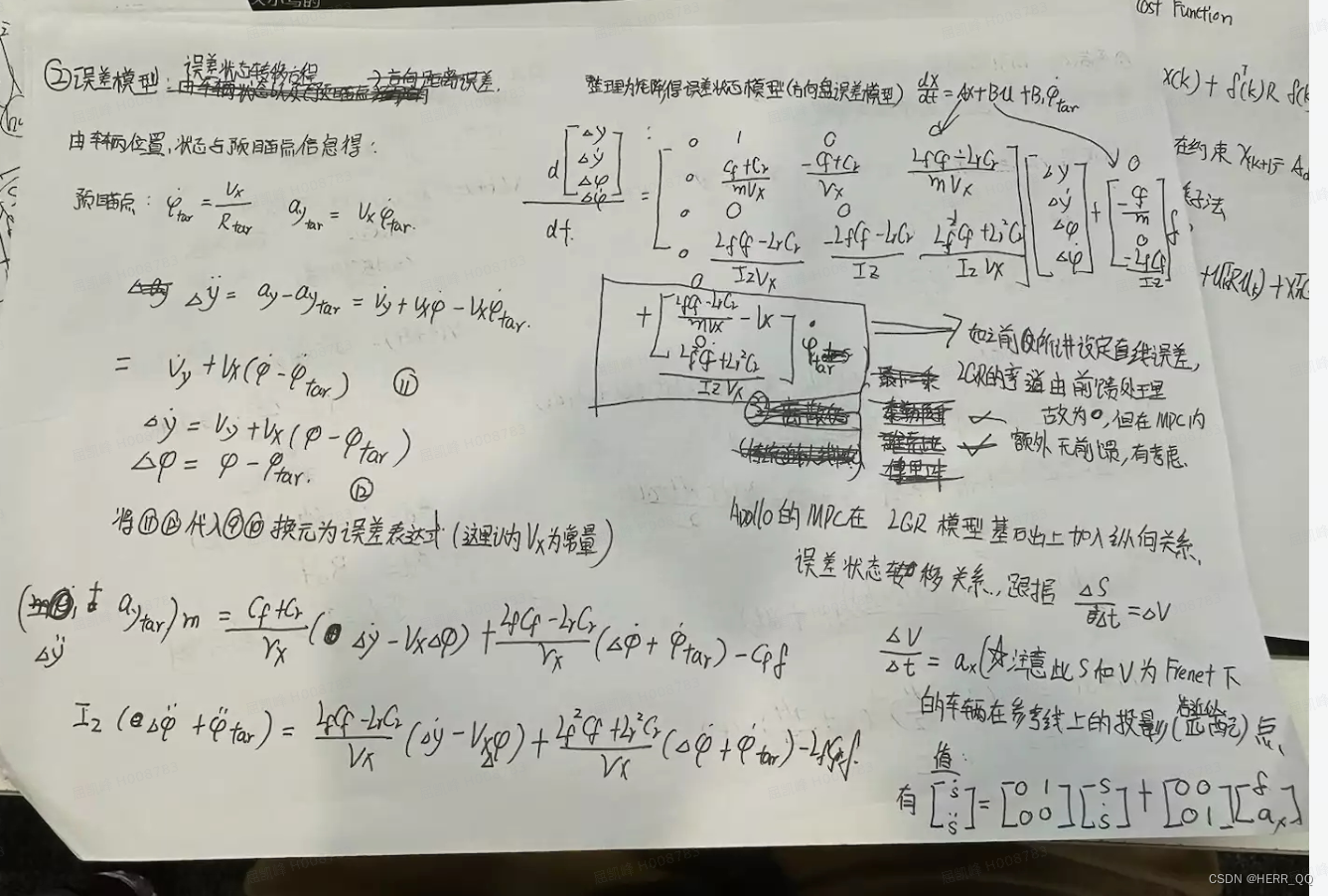
因此我们直接得出状态量之间的递推表达关系即可(状态转移方程),推导如下(当然也可以使用之前的动力学和运动学的推导来建立mpc,这里展示使用的另一种横向模型)
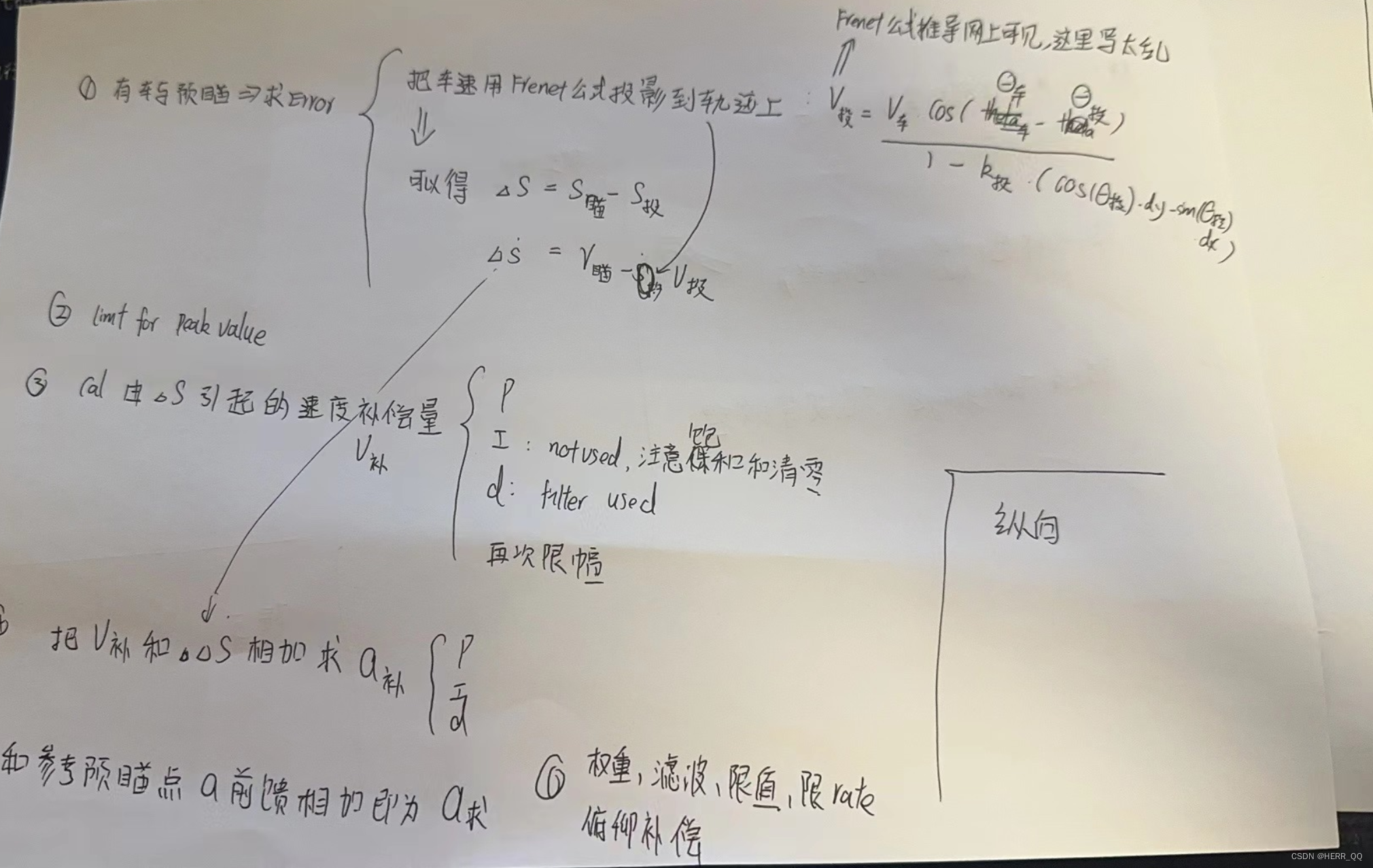
以下是除了模型之外的,mpc控制部分的处理(找投影点,预瞄点),以及纵向pid的设置


其他:
-颠簸
-手力
-控制接口转化
-握手
-滤波
-限幅
-限rate
-侧倾
-前置车道线处理
-激活退方向盘稳定渐入渐出
-canoe ape分析
-matlab回放 ros回放
- usw.
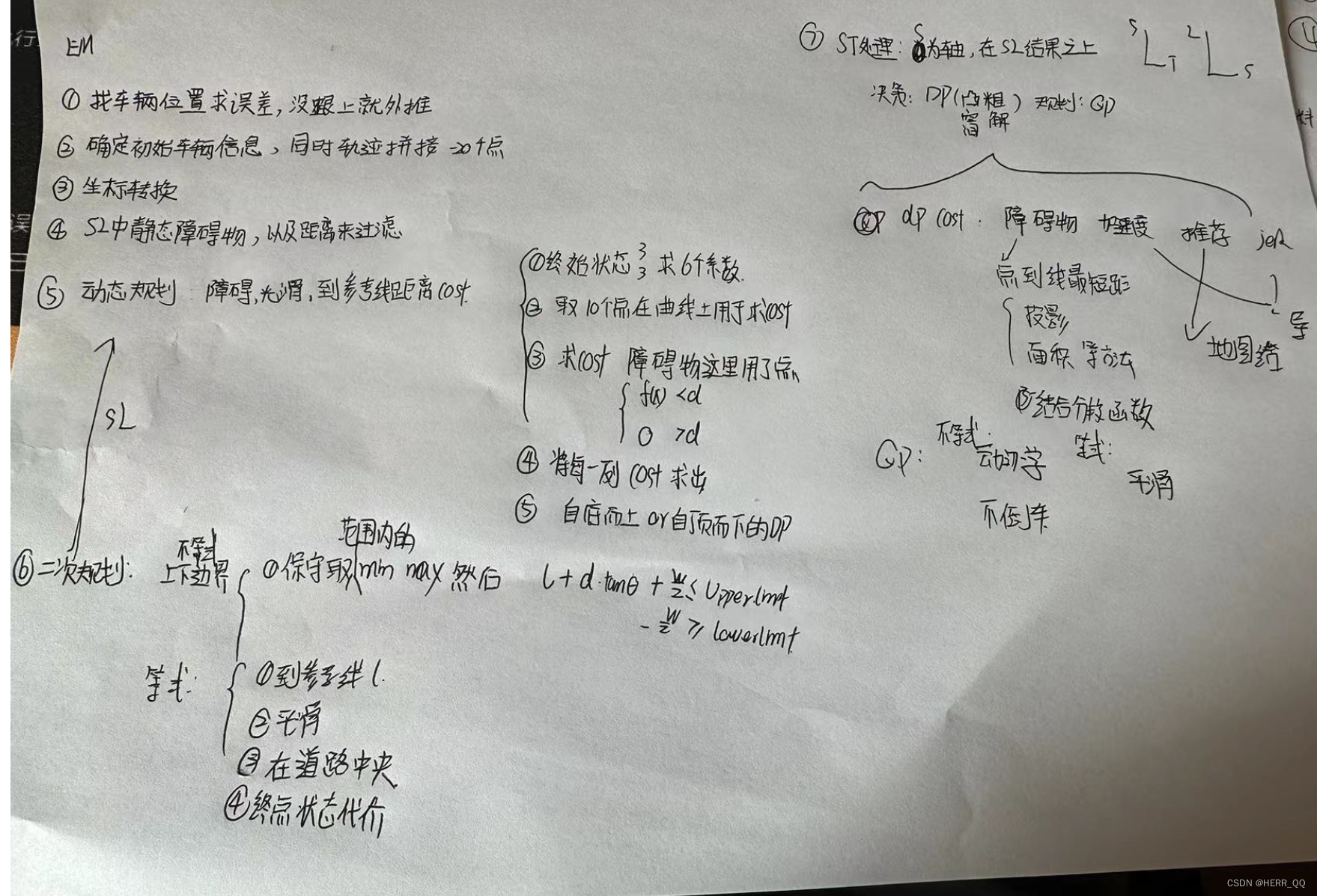
临时EM planner
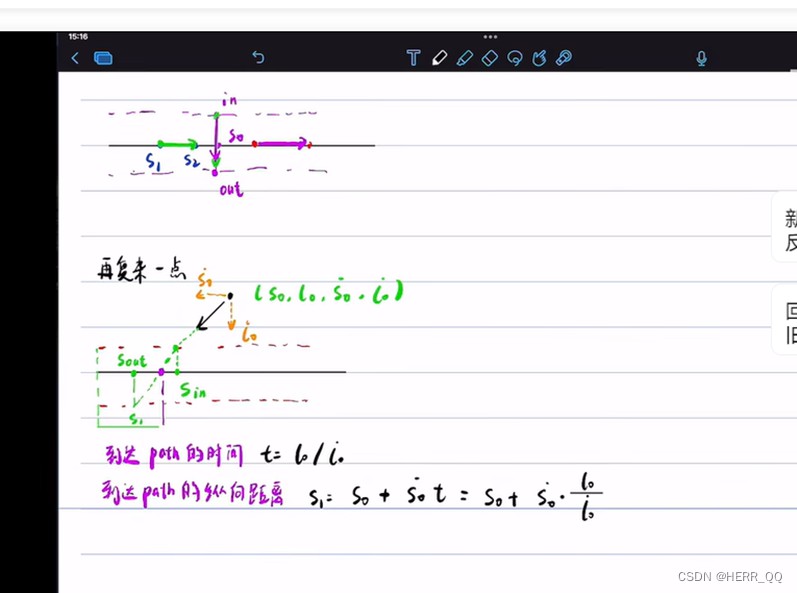
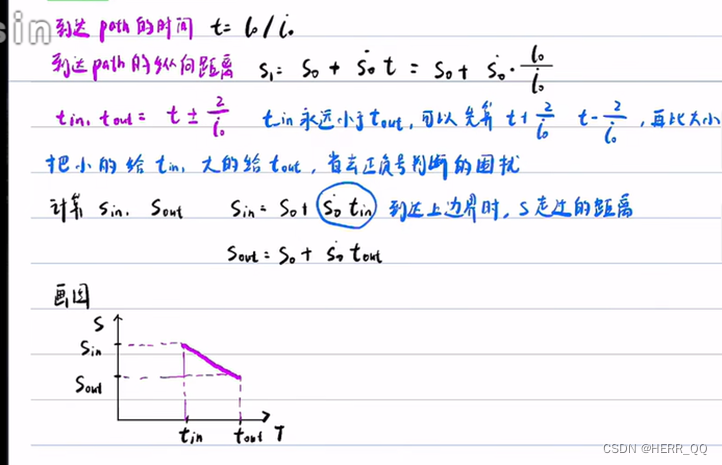
补充:找起点时间要顺延一个planning cycle
- 轨迹筛选、碰撞检测
- 巡航为四次多项式 没有终点s
- frenet下的平滑不代表卡迪尔下平滑
注意 以下图片均出自于老王 bilibili
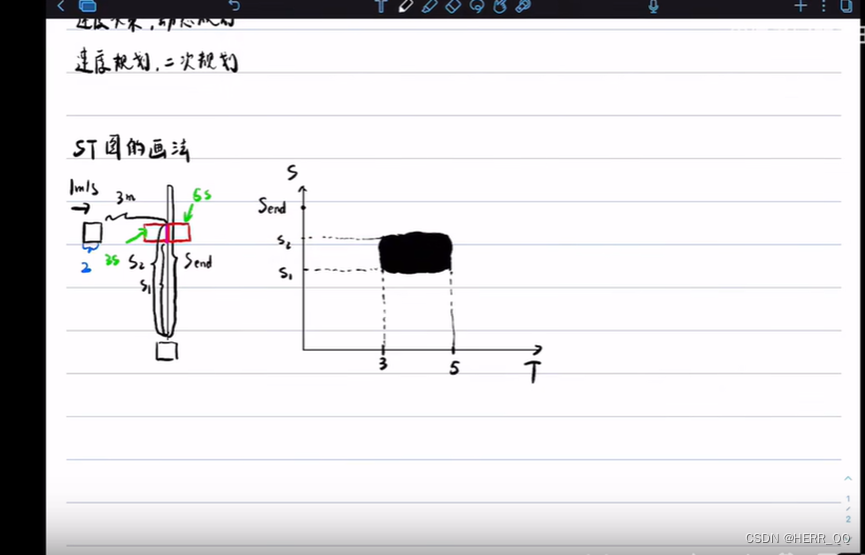




特殊情况

以前的杂乱总结版本
最后听讲
